Descripción
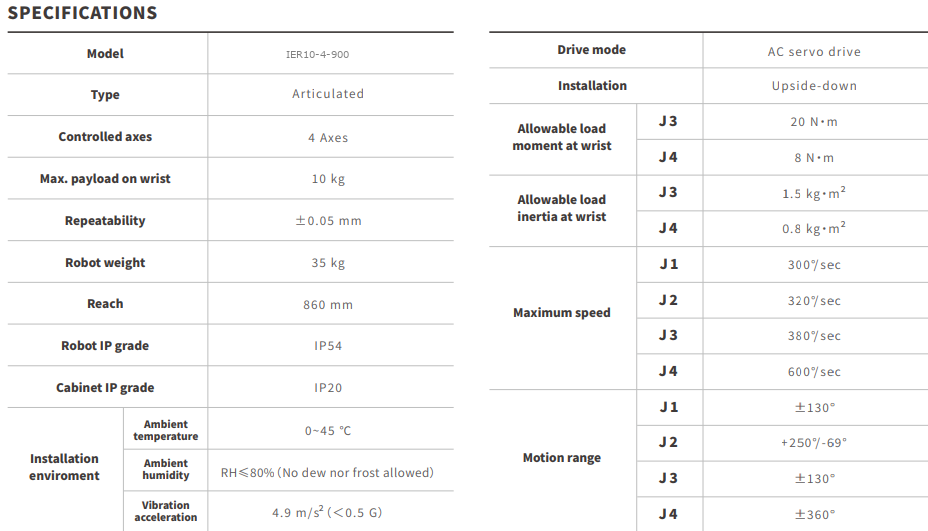
El IER10-4-900 es un robot industrial articulado de 4 ejes, desarrollado para aplicaciones de manipulación industrial que requieren alta estabilidad, precisión y velocidad de operación. Cuenta con una capacidad de carga máxima de 10 kg y un alcance máximo de 860 mm, lo que lo convierte en una solución eficiente para procesos automatizados de handling en entornos productivos exigentes.
Este modelo incorpora un diseño de muñeca de alta inercia, que mejora significativamente la estabilidad durante movimientos a alta velocidad. En combinación con algoritmos cinemáticos avanzados, Permite mejorar el takt time del proceso, optimizando la eficiencia general de la línea de producción.
Gracias a su diseño de sellado de articulaciones de nivel industrial y a su sistema de prevención de fugas de aceite, el robot puede operar en escenarios con altos requisitos de limpieza, facilitando su implementación en procesos donde la confiabilidad y la limpieza operativa son críticas.
El cuarto eje de rotación aporta una mayor flexibilidad, permitiendo adaptarse a distintas configuraciones de montaje y layouts productivos. Está diseñado para operaciones de manipulación, siendo adecuado para industrias como fabricación de PCB, manufactura electrónica, plásticos, piezas metálicas y otras aplicaciones industriales. Además, admite instalación invertida (upside-down), facilitando su integración en líneas de producción automatizadas y celdas robotizadas existentes.